2025
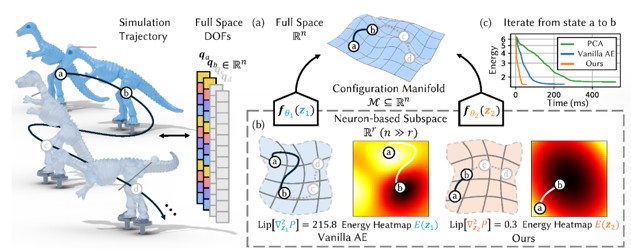
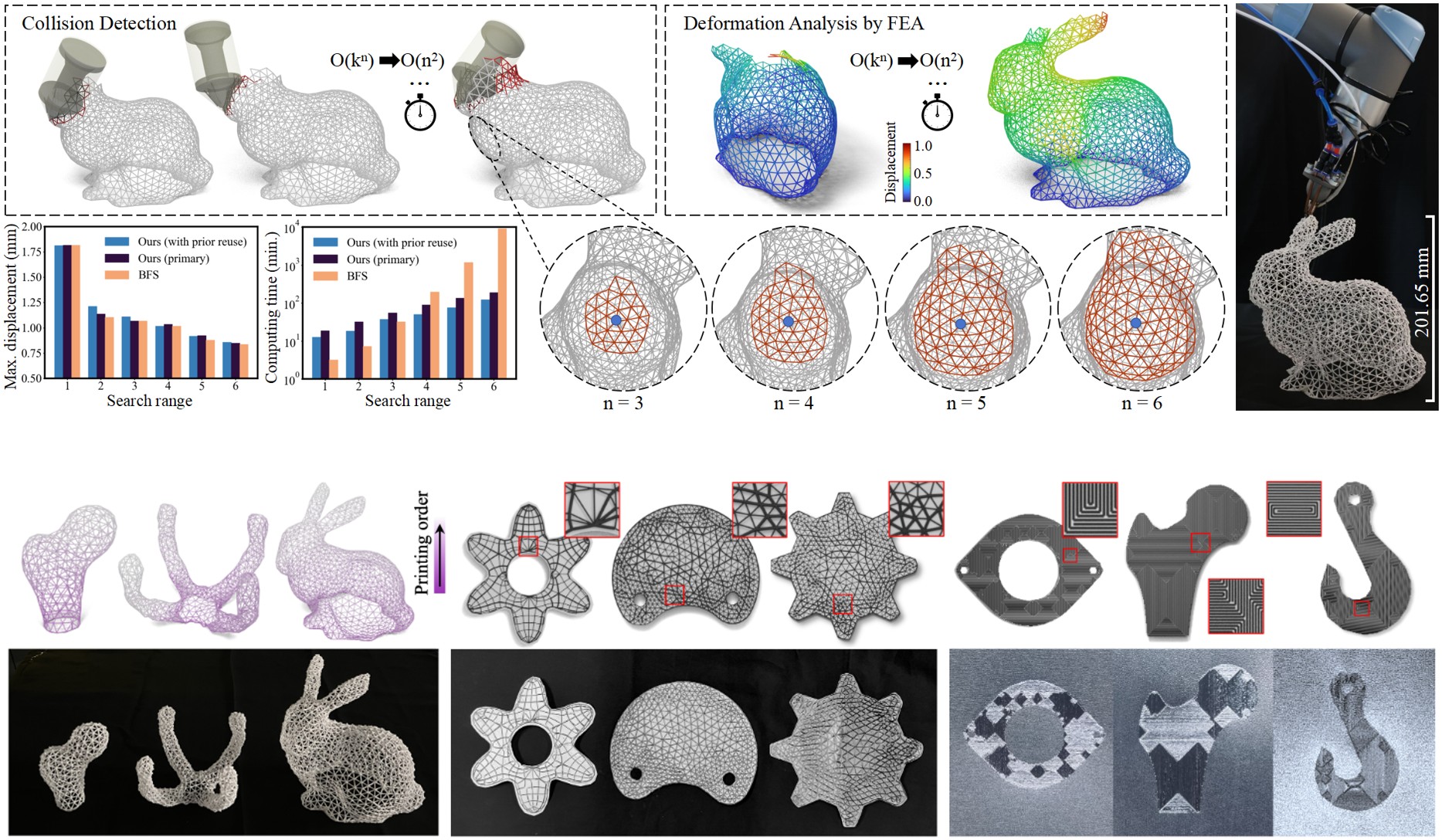
Jiasheng Qu, Zhuo Huang, Dezhao Guo, Hailin Sun, Aoran Lyu, Chengkai Dai, Yeung Yam, and Guoxin Fang*, "INF-3DP: Implicit Neural Fields for Collision-Free Multi-Axis 3D Printing", ACM Transactions on Graphics (SIGGRAPH Asia 2025), vol.44, no.6, December 2025. [Project] [arXiv] [Video@YouTube]
Chengkai Dai†, Tao Liu†, Dezhao Guo, Binzhi Sun, Guoxin Fang, Yeung Yam, and Charlie C.L. Wang*, "Curve-based slicer for multi-axis DLP 3D printing", ACM Transactions on Graphics (SIGGRAPH Asia 2025), vol.44, no.6, accepted, December 2025. [Project] [arXiv] [Video@YouTube]
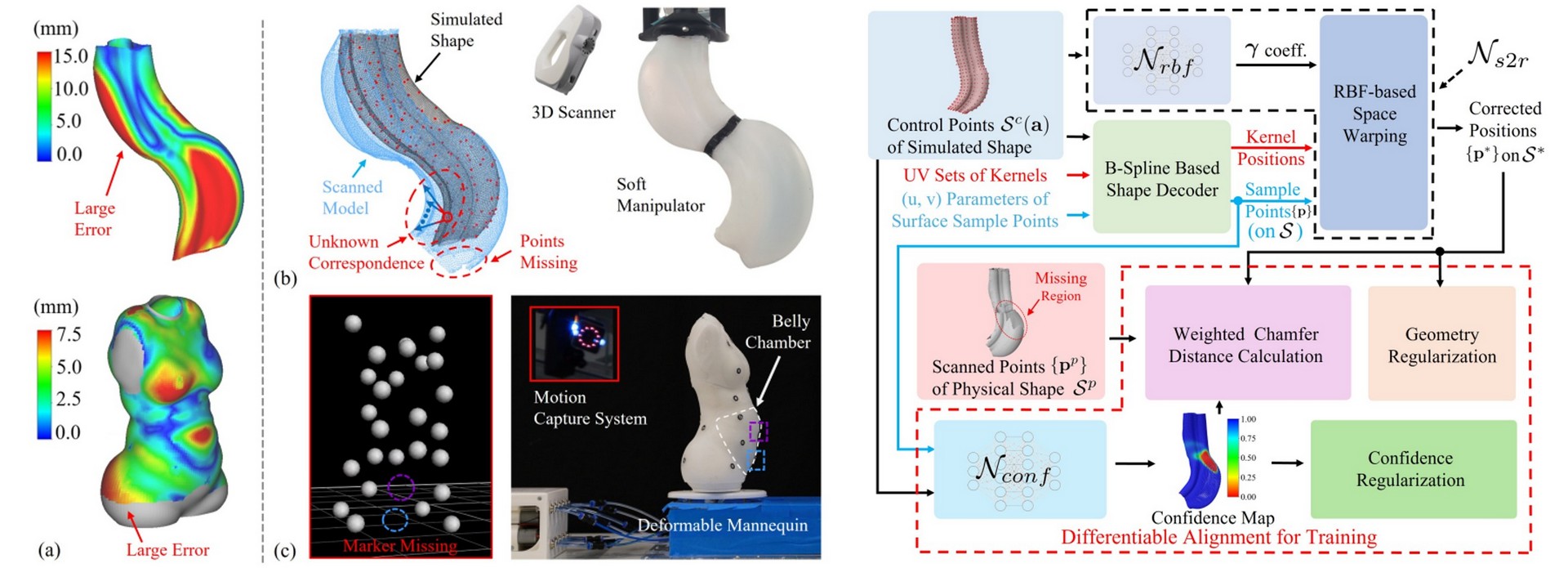
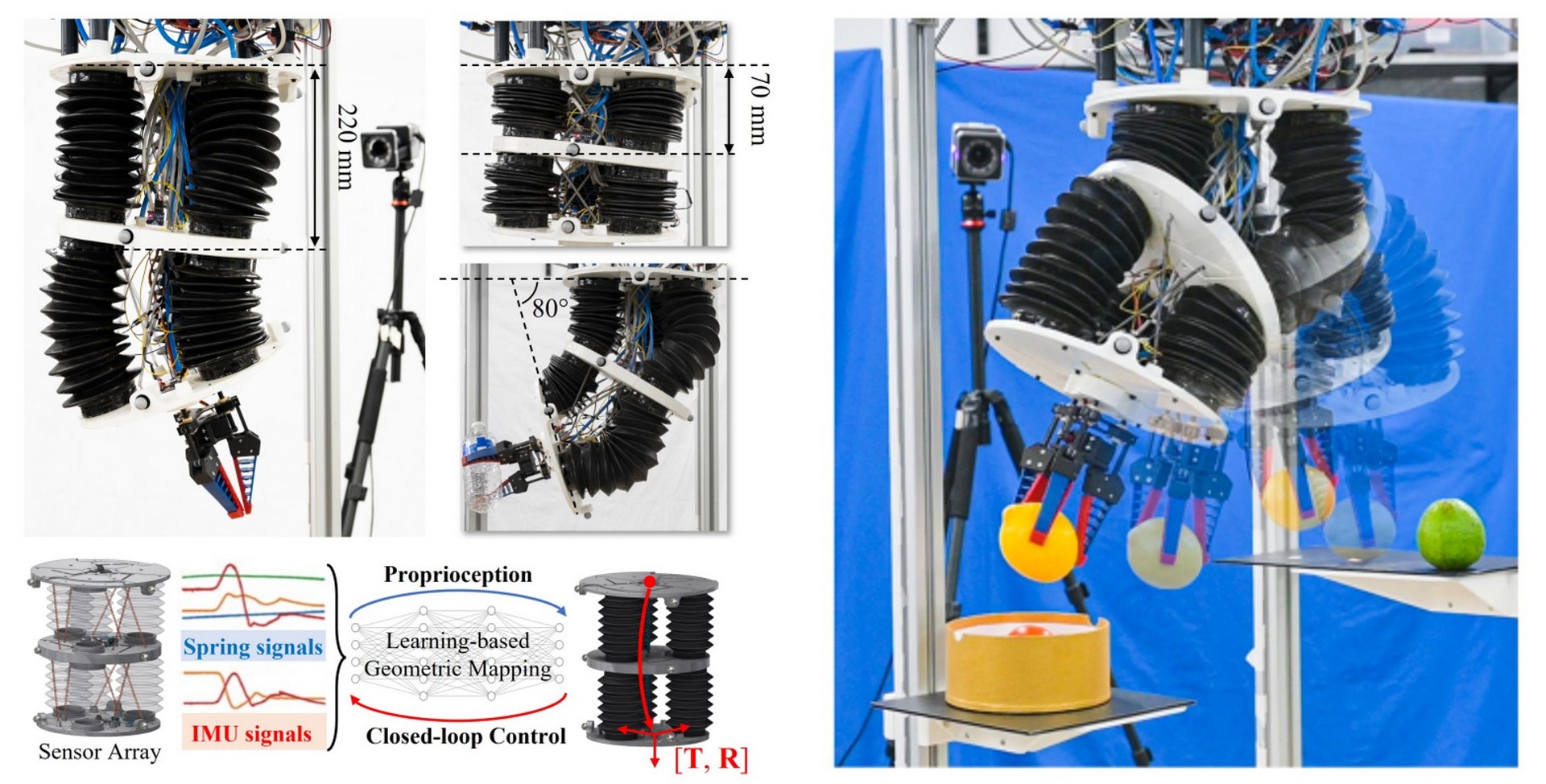
Yingjun Tian, Guoxin Fang, Renbo Su, Aoran Lyu, Neelotpal Dutta, Simeon Gill, Andrew Weightman, and Charlie CL Wang*, "Correspondence-Free, Function-Based Sim-to-Real Learning for Deformable Surface Control", IEEE Transaction on Robotics, conditionally accepted, 2025 (extension of RSS 2024). [Arxiv]
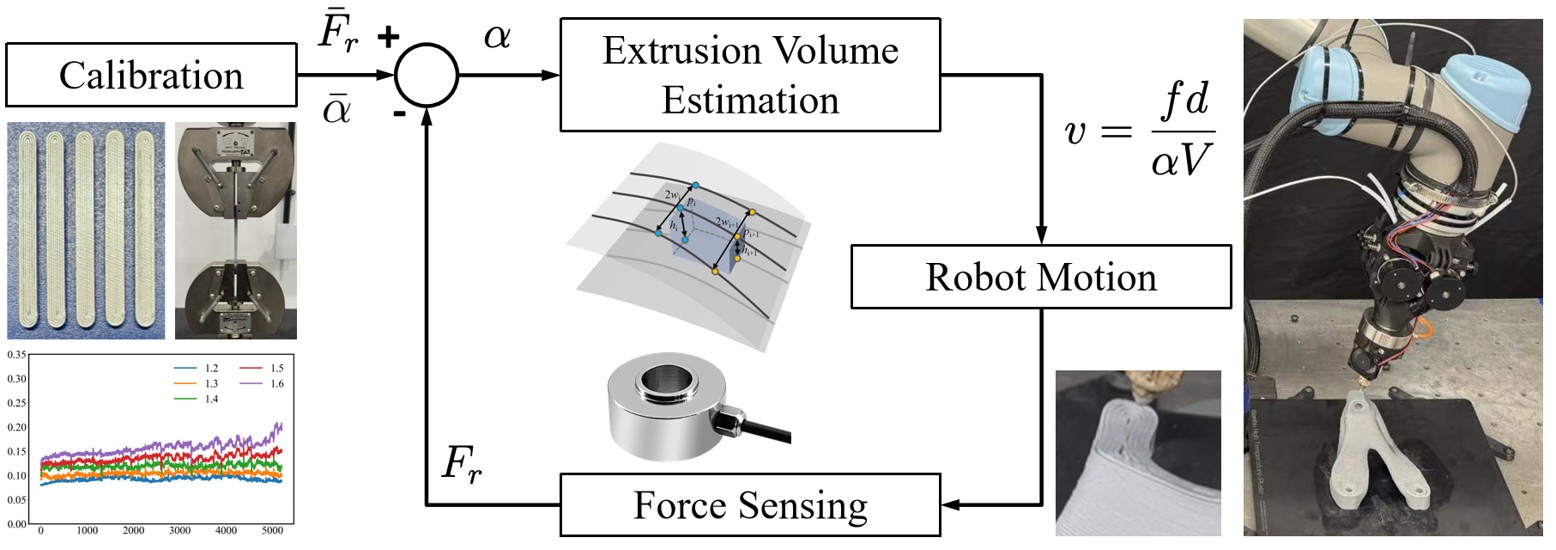
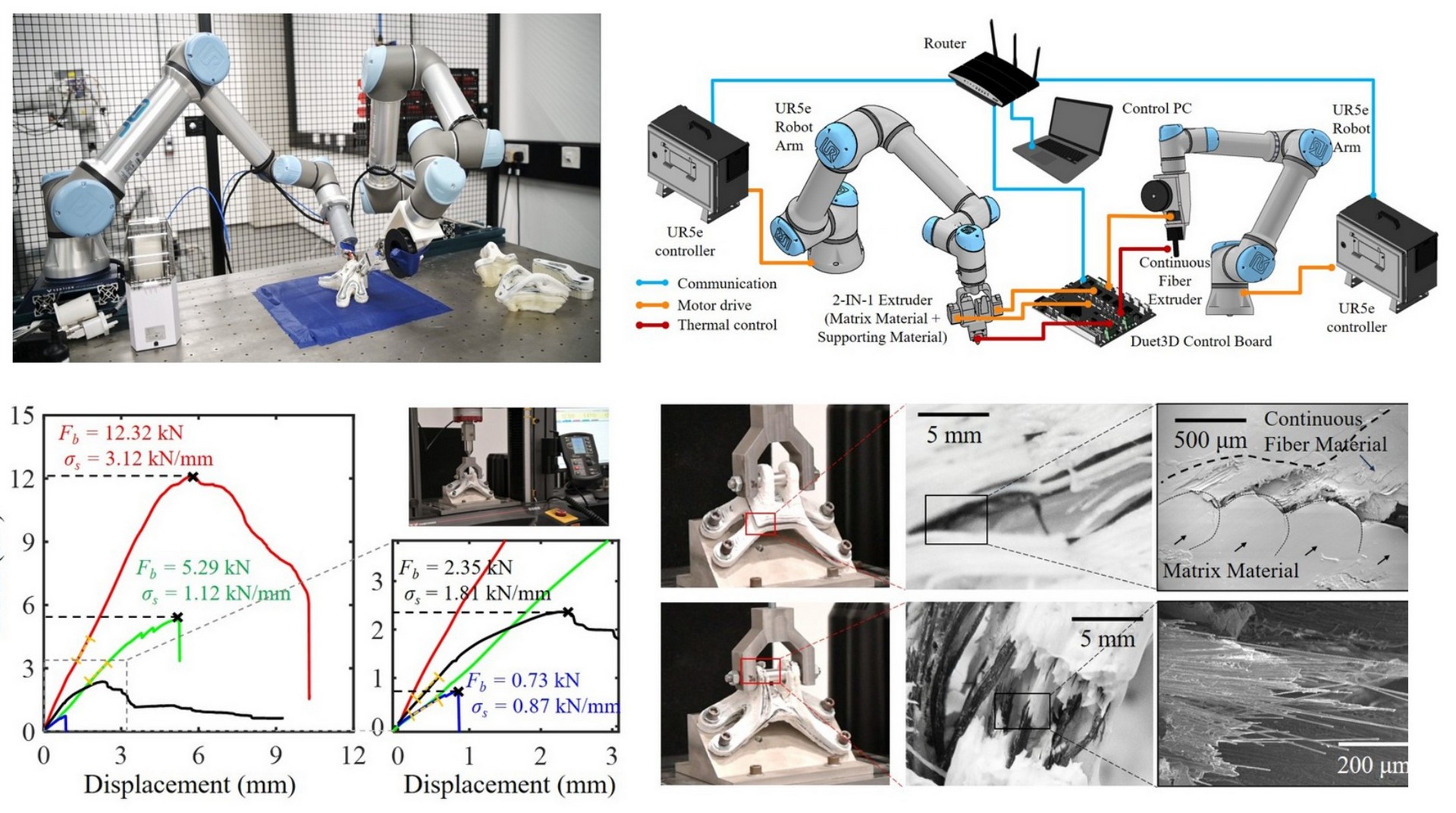
Yuming Huang, Renbo Su, Kun Qian, Tianyu Zhang, Yongxue Chen, Tao Liu, Guoxin Fang, Weiming Wang, and Charlie C.L. Wang, "Force-based adaptive deposition in multi-axis additive manufacturing: Low porosity for enhanced strength", Robotics and Computer-Integrated Manufacturing, vol.98, 103123 (13 pages), 2025. [Project] [Video@YouTube]